Research · 2026
Humanoid & Craft
Translating a woodcarver's tacit craft for humanoid robotic fabrication.
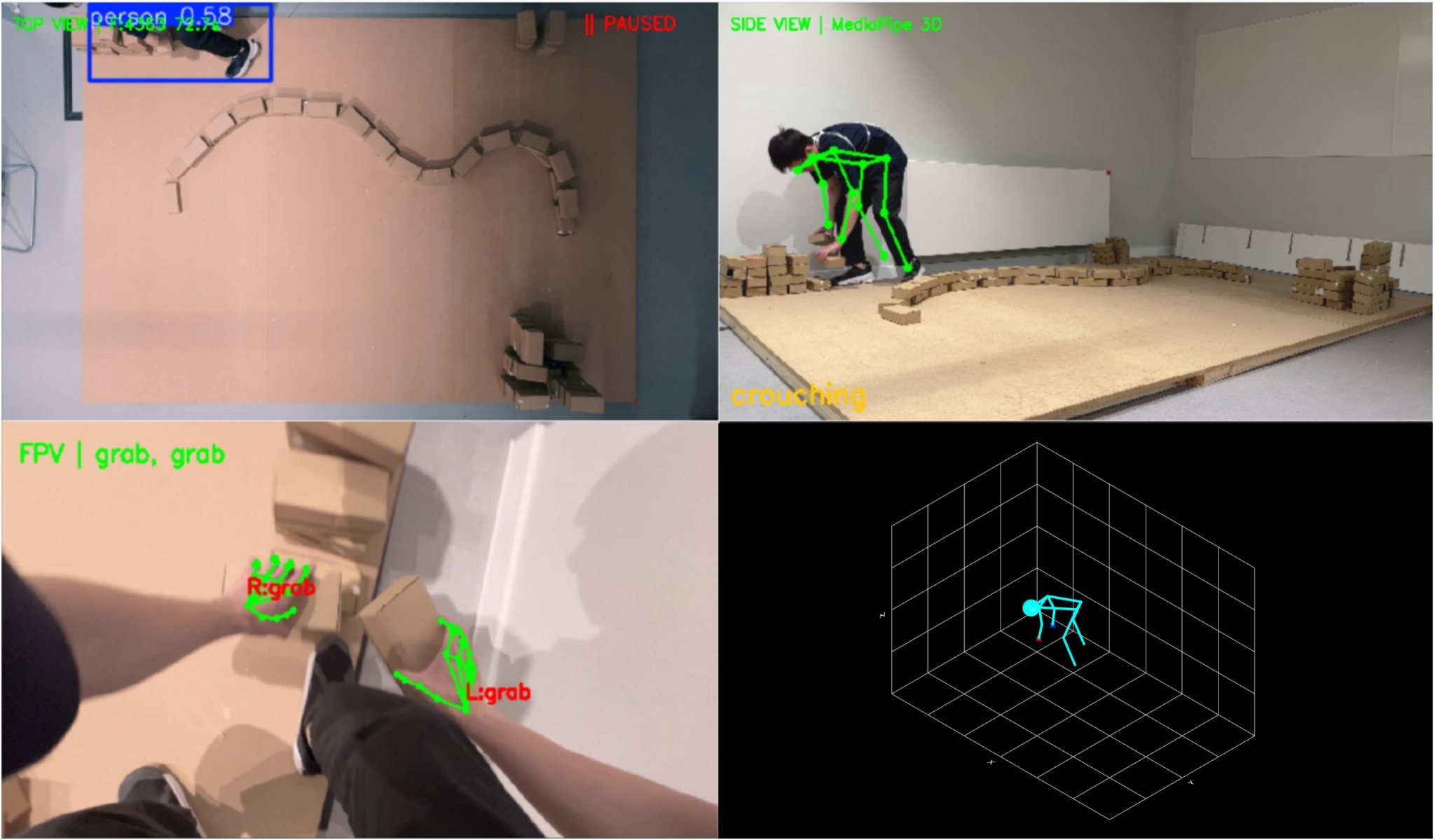
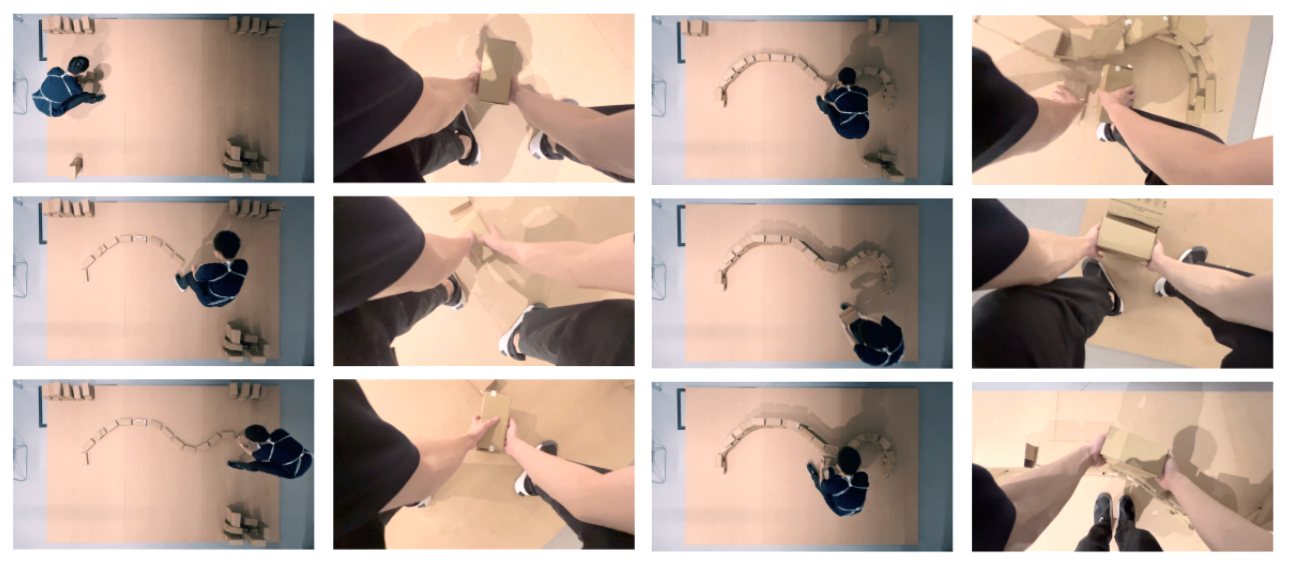
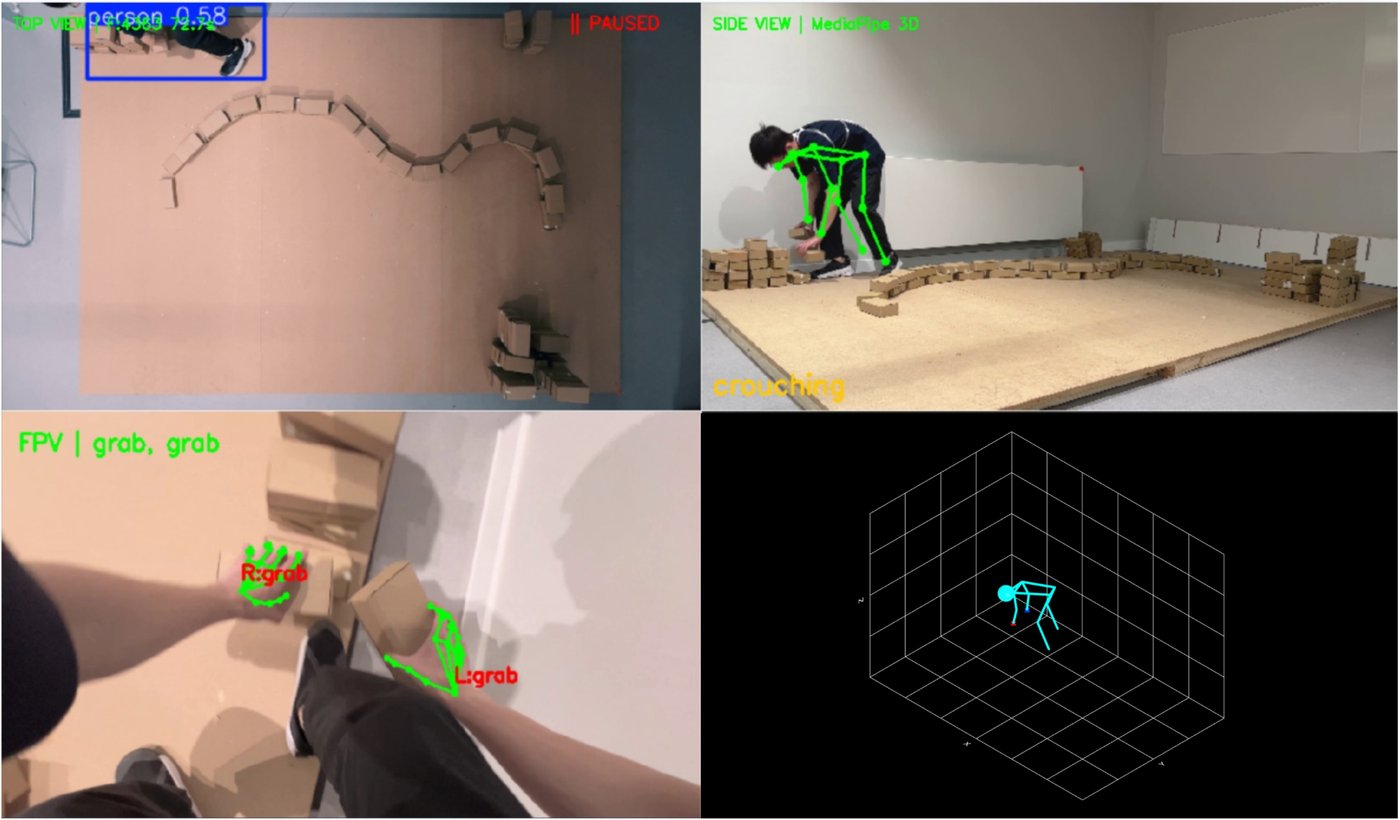
A first-author eCAADe 2026 paper that turns a woodcarver's tacit, haptic craft into executable humanoid-robot procedures, without haptic sensors. YOLOv8-pose captures the artisan's hand and upper-limb motion; a local LLM with Retrieval-Augmented Generation grounds those gestures in material, tool and safety constraints; and a digital twin validates the plan before the robot runs it. It frames heritage preservation as evolution, not replication.
First-author paper, eCAADe 2026: Embodied Craft: Translating Tacit Woodworking Knowledge to Humanoid Robotic Fabrication via Vision-Language Models.
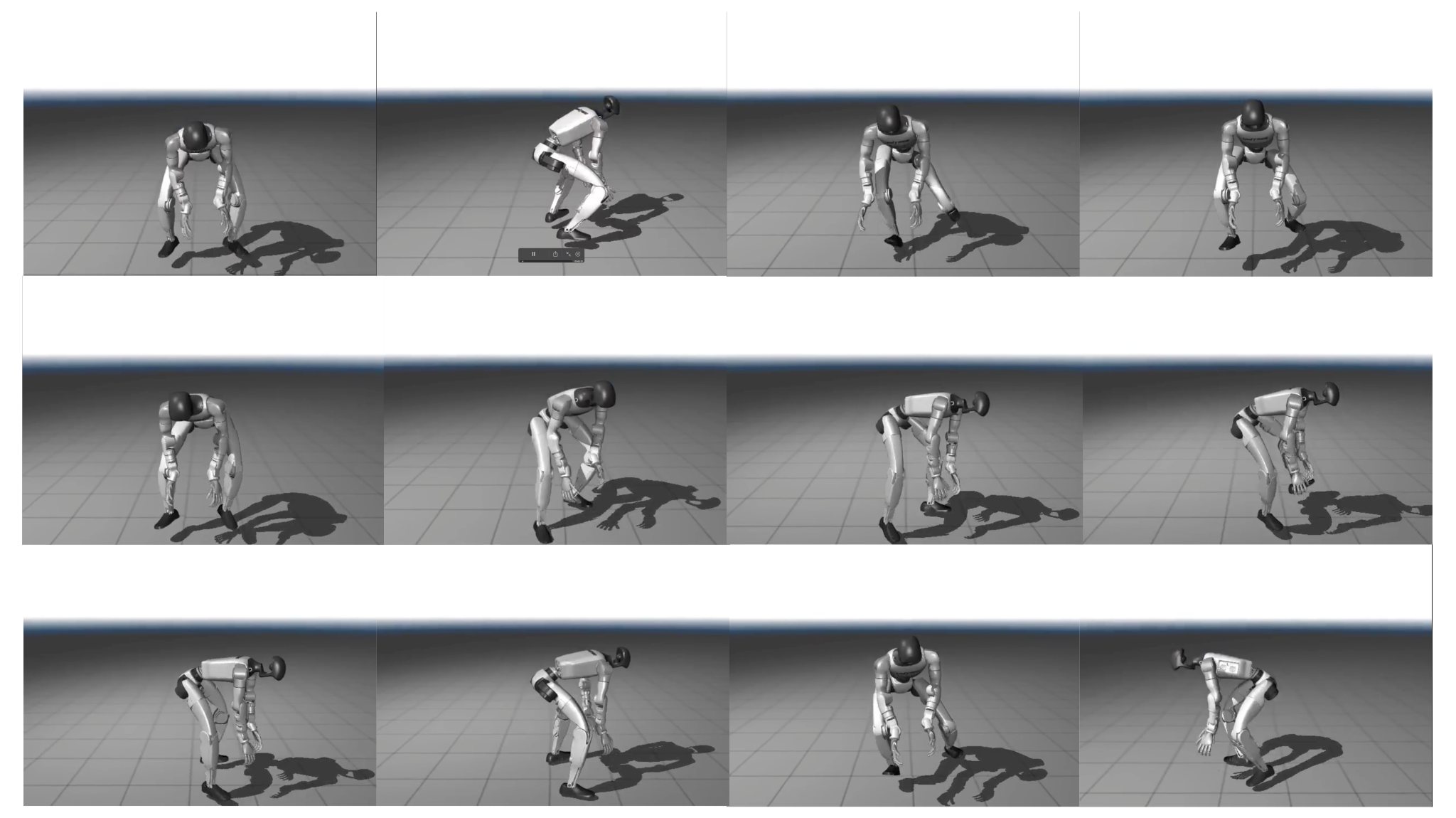
The tacit knowledge in an artisan’s body, the feel of the tool against the wood, is lost in standard XYZ-coordinate CNC programming. This work captures a woodcarver’s gestures with YOLOv8-pose, reads them through a local LLM with Retrieval-Augmented Generation (grounding intent in material, tool and safety limits), and validates the result in a digital twin before a humanoid robot runs the repetitive roughing, leaving the artisan the creative direction.
Co-authors: Yuemin Gong, Jianing Luo, Boyuan Yu and Adam Holloway.